


- Más
Investigadores chinos presentan exoesqueletos de mano robótica no motorizados con gran capacidad de agarre, gran potencial de aplicación en rescate y exploraciones del espacio profundo
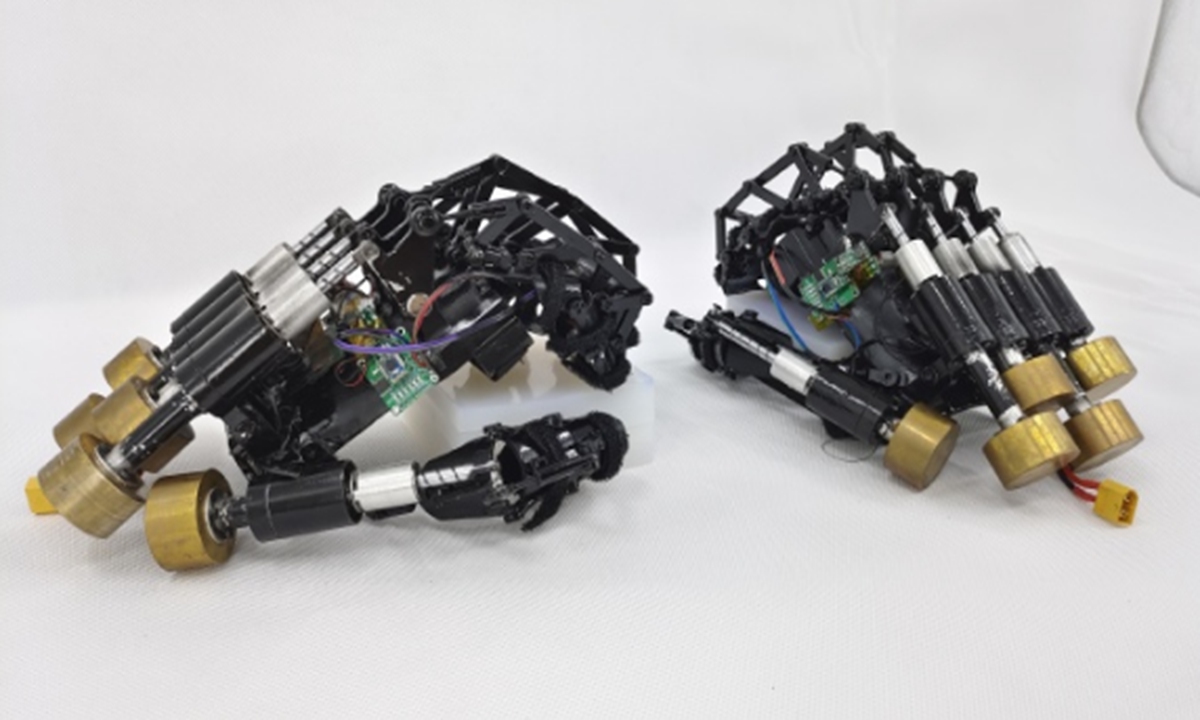
Exoesqueletos robóticos no motorizados para manos desarrollados por un equipo de investigación dirigido por Sun Shuaishuai, profesor de la Universidad de Ciencia y Tecnología de China. Foto: China Science Daily
Investigadores chinos presentaron recientemente al mundo un conjunto de exoesqueletos robóticos no motorizados para manos que abordarían las limitaciones de fuerza y la fatiga de la mano durante tareas físicamente exigentes, permitiendo a los usuarios levantar placas de pizarra de más de 200 kilogramos con facilidad.
Según China Science Daily, los exoesqueletos robóticos no motorizados para manos fueron desarrollados conjuntamente por el equipo de investigación dirigido por Sun Shuaishuai, profesor de la Universidad de Ciencia y Tecnología de China. Según los resultados de la investigación, publicados en IEEE Transactions on Robotics, el exoesqueleto se basa en actuadores magnetorreológicos (MR) para proporcionar un alto soporte de agarre y aumentar la resistencia del mismo. Además, adopta una solución muy diferente a la de la mayoría de los exoesqueletos de mano existentes, que están "motorizados, lo que dificulta la generación de una alta fuerza de soporte para aumentar el agarre", según el artículo.
Estos exoesqueletos de mano robóticos no motorizados resaltan su amplio potencial de aplicación, como se presenta en el artículo: "En escenarios de rescate como el rescate tras un terremoto, la limpieza de escombros y la evacuación de heridos, nuestro exoesqueleto facilita eficazmente el agarre y mejora la eficiencia del trabajo".
En las operaciones de rescate tras un terremoto, la complejidad del entorno in situ a menudo impide el despliegue de la mayoría de los equipos, lo que obliga a los rescatistas a depender en gran medida del trabajo manual para retirar escombros pesados. Por consiguiente, el equipo de investigación también realizó experimentos simulados de rescate tras un terremoto. Durante las tareas de rescate de personas atrapadas y el transporte de heridos, la amplitud de las señales electromiográficas (EMG) de los músculos flexores de los dedos de los sujetos (músculos que controlan la flexión de los dedos) se redujo significativamente, lo que indica una disminución sustancial de la actividad de los músculos responsables del agarre de los dedos. Durante el transporte de los heridos, en comparación con cuando no usaban los guantes de exoesqueleto, la frecuencia respiratoria de los sujetos disminuyó un 20 % en promedio, mientras que la distancia máxima de transporte aumentó un 110 %, según Mai Xianlong, estudiante de doctorado de la USTC y primera autora del artículo.
Sun añadió: «Además de estos escenarios, podemos aprovechar las propiedades de amortiguación de los materiales magnetorreológicos para diseñar exoesqueletos de mano y brazo capaces de proporcionar retroalimentación de fuerza. Simultáneamente, al integrar la captura de movimiento articular, podemos implementar la teleoperación de brazos y manipuladores robóticos remotos, a la vez que se proporciona retroalimentación de fuerza real, para misiones de exploración del espacio profundo».
El actuador MR alcanzó una fuerza de retención máxima de 1046 N con tan solo 5 W de potencia de entrada, lo que representa una relación fuerza-potencia un orden de magnitud superior a la de los métodos convencionales, y una reducción de energía del 97,7 % para la misma fuerza de retención en comparación con otros métodos, según el artículo.
Los participantes que usaron los exoesqueletos de mano experimentaron una mejora del 41,8 % en la fuerza de agarre sin energía externa y una reducción de la fatiga muscular de la mano durante tareas físicas prolongadas, según el informe.
Sun indicó que el próximo paso del equipo de investigación es mejorar aún más la funcionalidad del sistema de exoesqueleto de mano.
"Por ejemplo, integraremos el reconocimiento de la intención humana para ajustar con mayor precisión la respuesta del exoesqueleto en función de la intención del usuario; mejoraremos la estructura del exoesqueleto aprovechando materiales compuestos y tecnología de impresión 3D para reducir el peso y aumentar la resistencia estructural; y perfeccionaremos el diseño de la interacción hombre-máquina para que el exoesqueleto alcance la mayor libertad de movimiento de la mano humana, reduciendo así el deslizamiento y la incomodidad entre el exoesqueleto y la mano humana", explicó Sun.
