


- Más
Los taikonautas verifican la adaptabilidad y la seguridad del movimiento del robot de inspección de tuberías de fabricación china en la Estación Espacial Internacional, lo que marca una primicia mundial

Los taikonautas realizan pruebas y verificación del robot de inspección de tuberías de la estación espacial en la Estación Espacial China. Foto: Cortesía de la Agencia Espacial Tripulada de China.
La Agencia Espacial Tripulada de China (CMSA) publicó el jueves un informe oficial que detalla los avances en la investigación científica y las aplicaciones relacionadas con la Estación Espacial China en 2025. El informe revela que, por primera vez a nivel internacional, se realizó una prueba en órbita de un robot de inspección de tuberías en la Estación Espacial China, verificando su adaptabilidad al entorno de las tuberías y la seguridad de su movimiento de rigidez variable.
El robot de inspección de tuberías de la estación espacial, según un informe de la CMSA del jueves, está diseñado para operaciones regulares de patrullaje e inspección en tuberías complejas en entornos de microgravedad. La verificación técnica en órbita del robot se centró en dos aspectos clave: su adaptación autónoma a tuberías complejas en microgravedad y la seguridad de su movimiento, según el informe. El robot fue diseñado por el Instituto de Robótica Inteligente, Escuela de Ingeniería Mecatrónica, Instituto de Tecnología de Beijing y el Departamento de Diseño General de Naves Espaciales, Instituto de Ingeniería de Sistemas de Naves Espaciales de Beijing.
Inspirándose en el mecanismo de movimiento de los pies ambulacrales de los equinodermos —que permanecen contraídos dentro del cuerpo cuando están estacionarios y se extienden hacia afuera durante el movimiento—, los investigadores propusieron un concepto de diseño biónico de rigidez variable: «extensión autónoma, contracción inducida por fuerza y ablandamiento pasivo sin energía».
Se diseñó un mecanismo de patas que combina estructuras telescópicas de tijera activas y pasivas, lo que permite al robot adaptarse a las complejas tuberías de la estación espacial, garantizando al mismo tiempo la seguridad de las mismas, según la CMSA.
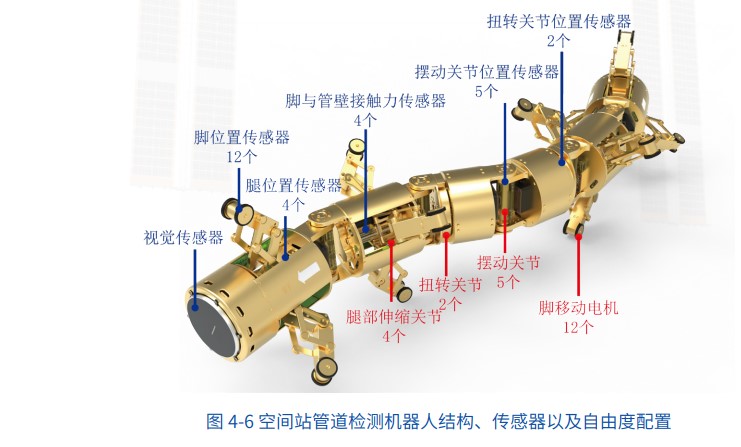
Ilustración del robot de inspección de tuberías. Foto: CMSA
Se desarrolló un algoritmo de control de movimiento coordinado de cuerpo completo y multitarea, adaptado a las complejas condiciones de las tuberías de la estación espacial. Este algoritmo utiliza información de sensores de cuerpo completo para calcular la postura y la posición del robot y generar estrategias de movimiento.
Priorizando la seguridad de las tuberías, ajusta la posición, la velocidad y la fuerza de todas las articulaciones del cuerpo, lo que permite que el robot se mueva de forma segura y fluida dentro de la tubería.
Se realizaron pruebas en órbita para evaluar la capacidad de movimiento y la adaptabilidad del mecanismo, verificando la tecnología de movimiento autónomo del robot y la seguridad de su mecanismo pasivo.
Esta prueba en órbita del robot de inspección de tuberías marca la primera prueba de un robot de operaciones especiales en cabina realizada en la estación espacial china, según el informe de la CMSA.
Se verificaron tecnologías clave, incluyendo el diseño de un robot de tuberías de gran tamaño y diámetro variable, capaz de adaptarse a diversas tuberías complejas, y el control de movimiento coordinado de cuerpo completo en varios niveles.
La prueba también confirmó la capacidad de movimiento adaptativo autónomo del robot y su seguridad en el complejo entorno de tuberías de la estación espacial, lo que generó una valiosa experiencia para su aplicación práctica en las tuberías de la estación espacial.
En el futuro, se mejorarán las funciones operativas del robot para tuberías para optimizar el funcionamiento de la Estación Espacial China. También se espera que se extienda a aplicaciones en tuberías terrestres de agua, petróleo y gas natural, así como en tuberías en estaciones de expediciones científicas polares.
